YOLO-v2
YOLO-v2
Introduction
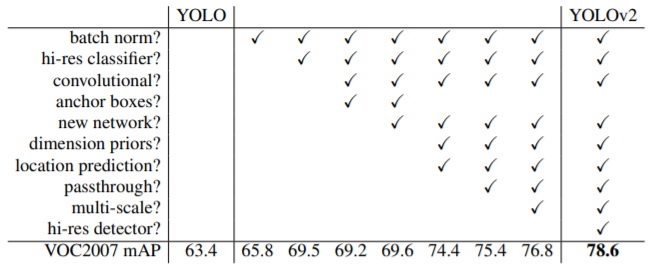
YOLOv2 (You Only Look Once version 2) 是一種即時目標檢測模型,專為在速度與準確率之間達成平衡而設計。該模型延續 YOLOv1 的單階段目標檢測架構,並引入多項技術改進。論文中主要基於 YOLO 模型提出幾點改善方法來提升其的速度與準確率,並可在 VOC2007 取得 67FPS 與 76.8mAP 的成績。除此之外,因為過往的偵測模型僅能偵測少量的物件,因此論文中也提出一訓練方法,可使偵測的物件數量達到 9000 個。 
YOLOv2 Improvements Over YOLOv1 (Better)
Batch Normalization
YOLOv2 中作者為每個卷積層都添加了 BN 層,並且不使用 Dropout,改善模型的收斂同時也取消其他的正規化方法,而在每層 convolutional layers 加入 batch normalization 也使模型提升 2%mAP。
High Resolution Classifier
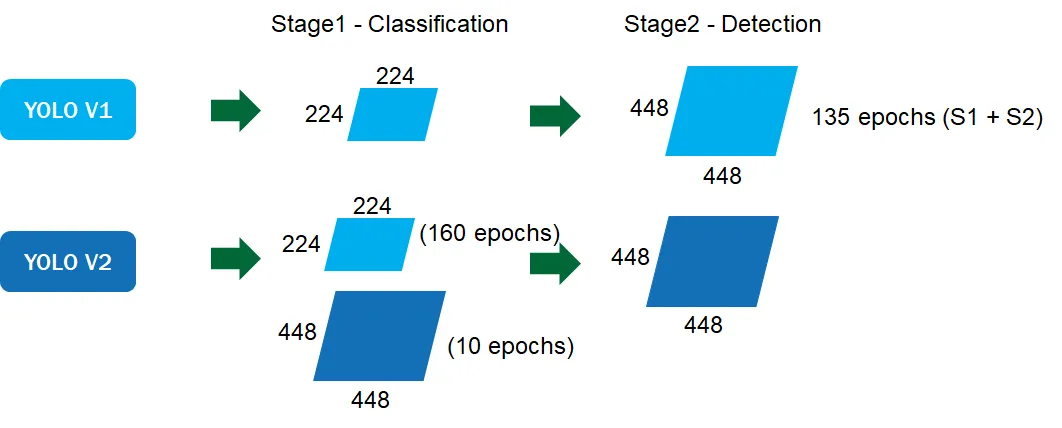
分類器與檢測網絡的解析度不一致 : 在 YOLOv1 中,分類器(用於提取特徵的部分)是在
224 * 224的解析度下訓練的。但是 YOLO 的檢測任務使用更高的解析度448 * 448圖像作為輸入。這導致分類器在低解析度上訓練後,直接應用於高解析度場景時表現不穩定。由於訓練過程中未在高解析度進行微調,特徵提取網絡對高解析度圖像的適應能力有限,從而影響檢測性能。在高解析度進行微調 : 首先使用 ImageNet 數據集,在低解析度
224 * 224上訓練 Darknet-19 主幹網絡 160 個 epoch,獲得預訓練權重。隨後將輸入解析度提升至448 * 448,並用相同的數據集,進一步進行 10 epoch 的微調,使分類器適應高解析度圖像。
這一策略使特徵提取網絡在更高解析度上能夠捕捉到更多細節,提高了模型對小物體和細微特徵的檢測能力。同時,由於微調階段只是基於已有權重進行少量更新,並不會顯著增加訓練成本。
Convolutional With Anchor Boxes
YOLOv2 引入 Faster RCNN 論文中 Anchor box 的概念,首先將 YOLO 的 FC layers 移除,並去掉後面一層池化層以保持輸出層的高解析度,此外,YOLOv2 也將輸入縮減為 416*416,經過下採樣 32 倍後,使得最後的輸出層是 13 x 13 的 feature map 輸出。
Dimension Clusters
在 Faster R-CNN 中,Anchor Boxes 的大小和比例是根據經驗設定的,並且模型會在訓練過程中調整 Anchor Box 的大小。然而,YOLOv2 引入了一種自動化方法,利採用 K-means 的方式對訓練集的 Bounding Boxes 作聚類,以自動找到最好的先驗框。
傳統上 K-means 的歐幾里德距離會導致較大的 Box 會比較小的 Box 產生更多的 error,聚類可能會偏頗。為了不讓誤差與 Box 的尺寸有太大關係,本文改變了距離函數:
論文中對不同的
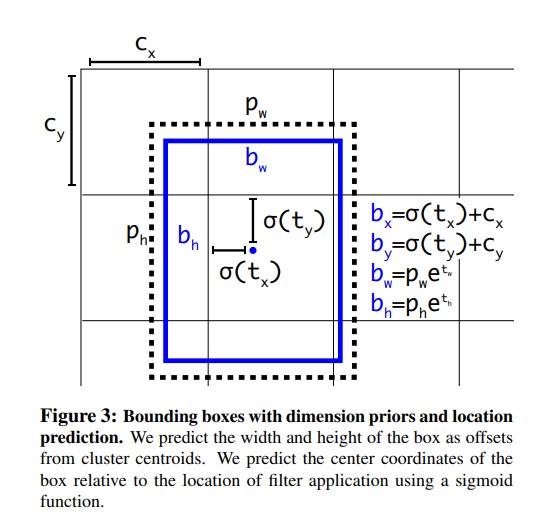
Direct location prediction
使用 Anchor Box 還有遇到一個問題預測 Box 的位置會導致模型迭代初期不穩定,因為原本的公式並沒有受到任何的約束,預測出的 Box 可能會出現在圖片的任何位置
YOLO v2 沒有使用這種預測方式反而沿用 YOLO v1 的方法,預測 Bounding Box 中心點相對於網格左上角位置
Fine-Grained Features
YOLOv2 使用了一種稱為「特徵融合」的方法,將低層細粒度的特徵整合到高層語義特徵中,從而提升對小物體的檢測能力。
YOLOv2 圖片輸入大小為 416x416,經過 5 次 Maxpooling 後得到 13x13 的特徵圖作預測,雖然對於大目標已經足夠了,但是因為隨著解析度的降低,小目標的檢測變得越來越困難。所以 YOLOv2 把高解析度的淺層特徵連線到低解析度的深層特徵(把特徵圖堆積在不同 Channel 中)而後進行檢測,具體的操作如下。
首先將原本 26×26x512 的 Feature map 進行特徵重排。特徵重排的操作就是分別按行和列隔點取樣,此時每個 Feature map 通道會乘以 4 如下圖所示。 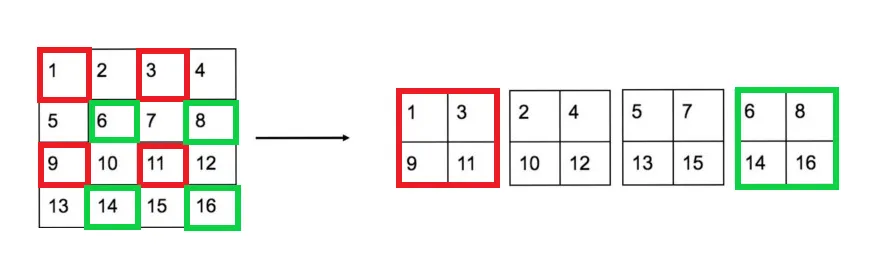
左完特徵重排後輸出就會變成 13x13x2048 拼接到後面 13x13x1024 的層的 Feature map,就會形成 13x13x3072 大小的 Feature map,相當於做了一次特徵融合,這樣就等於在縮小的特徵途中仍然保有其細部特徵,有利於檢測小目標,如下圖所示。
Multi-Scale Training
由於 YOLOv2 下採樣步長為 32,最後特徵圖會為原圖尺寸的 32 分之一 ,所以輸入圖片大小要選擇 32 的倍數。
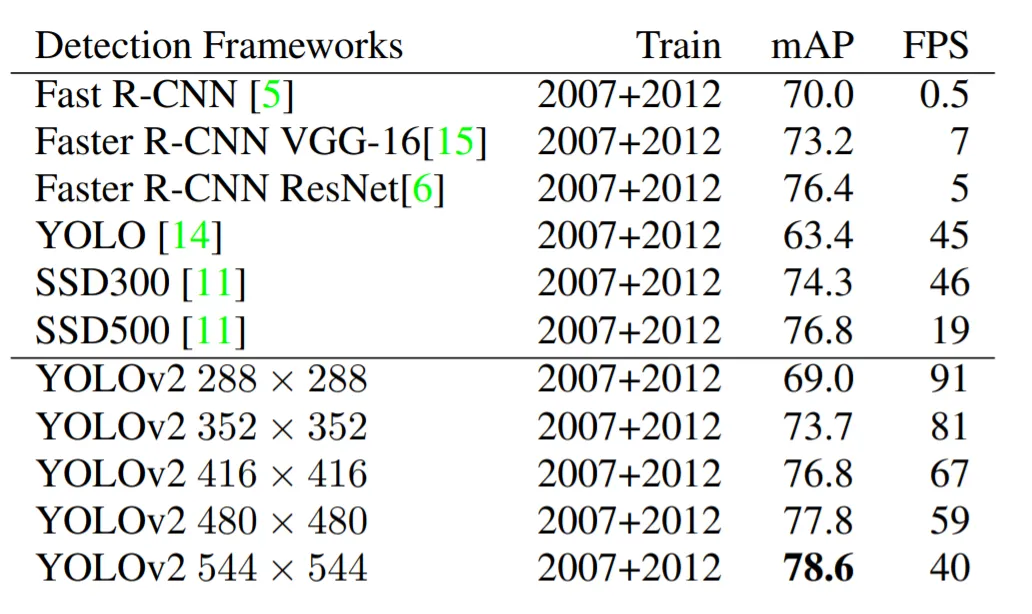
實驗證明,Multi-Scale Training 使得同一個網絡對不同分辨率的圖片都可以更好地進行檢測,提高了網絡性能。可以參考下圖,在 VOC 2007 數據集上可以觀察到,擁有高解析度輸入的圖片 mAp 會比較高雖然速度(FPS)相對較慢。
Hierarchical Classification
主要是作者提出了將 COCO 檢測數據和 ImageNet 分類數據綜合的聯合訓練機制。
數據綜合的聯合訓練會有一個問題,ImageNet 資料有 1000 類,而 COCO 資料只有 80 類,最直覺的想法就是直接增加輸出分類的維度,但是類別關係不一定是互斥,比如一個狗,ImageNet 中分為好多種(哈士奇、狼犬...),這樣存在包含關係,所以作者根據 WordNet ,將 ImageNet 和 COCO 中的類別一起構建了一種樹資料結構(WordTree),通過 WordTree 中找到數據的不同標籤直接的關係,找到所有標籤的最上面的根節點,依次往下梳理標籤,添加對應的中間標籤。而添加的原則為:
- 父節點必須包含子節點的數據范圍(比如父節點是貓,子節點就是波斯貓等貓的種類等)。
- 如果添加節點的時候有兩條路可以到達,那麼就選擇最短的路徑來添加子節點。

YOLO9000 不對所有類別進行,而是對同一層級的每個父節點進行操作,如下圖下半部所示,每一個 Softmax 都代表一個父節點。 而在預測類別概率時是使用條件機率 ,比如說哈士奇的機率是 P(哈士奇) = P(動物)*P(狗|動物)*P(哈士奇|狗),同一個父節點下的子節點預測概率總和為 1(上面提到的 Softmax)。 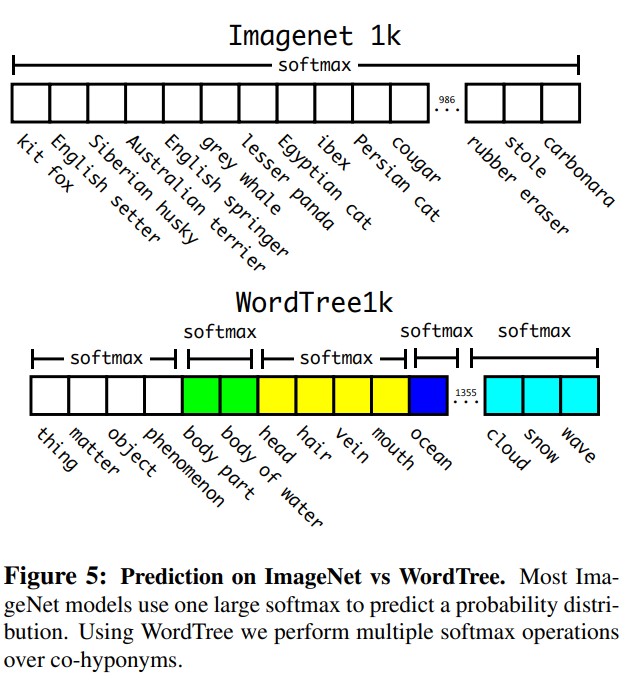
預測物體所屬的類別時,從根結點開始往下遍歷,對於每一個節點,選擇其子節點中概率最大的節點往下遍歷,直到到達葉節點或節點的概率小於設定的閾值,那麼就停止遍歷。
YOLO9000 從原本的 5 個 Anchor box 減少到 3 個,以減少計算量。YOLO2 的輸出是 13x13x5x(4+1+20),現在 YOLO9000 的輸出是 13x13x3x(4+1+9418)。使得 YOLOv2 能夠識別到 9000 多種物體。
YOLOv2 架構
YOLOv2 的網路結構基於 YOLOv1 的架構進行改進,核心為一個全卷積網路,整體架構更加高效且準確。
1. 網路主幹 (Backbone Network)
Darknet-19:
- 包含 19 層卷積層 + 5 層最大池化層。
- 捨棄全連接層,完全採用卷積結構。
- 使用 ReLU 作為激活函數,後續改為 Leaky ReLU。
- 卷積核配置:
- 主幹結構逐步增加特徵圖的深度,通過 3x3 和 1x1 卷積交替進行壓縮。
- 採用 Batch Normalization (BN) 提高收斂速度並減少過擬合。
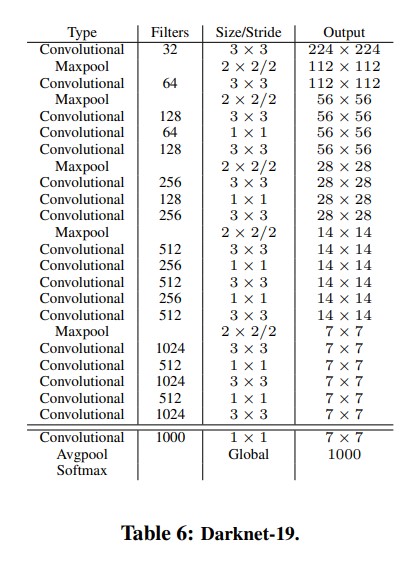
yolo-v2-darknet19
2. 高分辨率分類器
- 在主幹訓練中,採用高分辨率輸入 (448x448) 進行微調,使分類模型適應更高的解析度。
3. 檢測層 (Detection Layers)
- 最終檢測層輸出:
- 特徵圖大小為 (13 \times 13 )。
- 每個格點預測 5 個 Bounding Boxes,每個框包含:
- 4 個框參數 ((t_x, t_y, t_w, t_h))。
- 1 個物體置信度。
- (C) 個類別分數。
YOLOv2 的損失函數
YOLOv2 的損失函數由三部分組成:
Bounding Box 損失:
- 計算預測框與真值框之間的位置與大小誤差。
置信度損失:
- 衡量每個 Anchor Box 中是否包含物體的準確性。
分類損失:
- 測量正樣本分類的準確性。
總損失公式如下:
公式參數解釋:
第一部分:Bounding Box 位置損失
- (x, y):框的中心點座標。
- (w, h):框的寬和高。
- 使用 (\sqrt{w}) 和 (\sqrt{h}) 減少對大框的懲罰。
第二部分:置信度損失
- (C):置信度分數,表示該格點是否包含物體。
- (\mathbf{1}_{ij}^{\text{obj}}):指示該框是否包含物體。
第三部分:分類損失
- (p(c)):預測的類別概率。
權重參數:
- (\lambda_{\text{coord}}):位置損失的權重。
- (\lambda_{\text{noobj}}):背景框損失的權重(通常設置較小)。
訓練流程
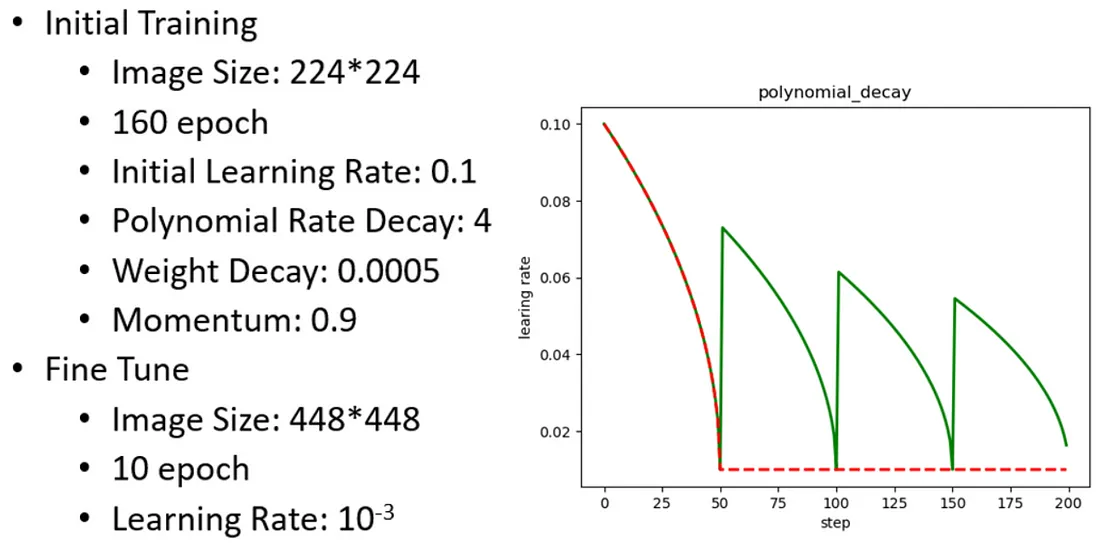
YOLOv2 的訓練主要包括以下三個階段:
- 在 ImageNet 分類數據集上用
224 * 224進行訓練,共訓練 160 個 epochs。 - 將模型的輸入尺寸調整為
448 * 448,繼續在 ImageNet 數據集上對分類模型進行微調,訓練 10 個 epochs。 - 將分類模型改為檢測模
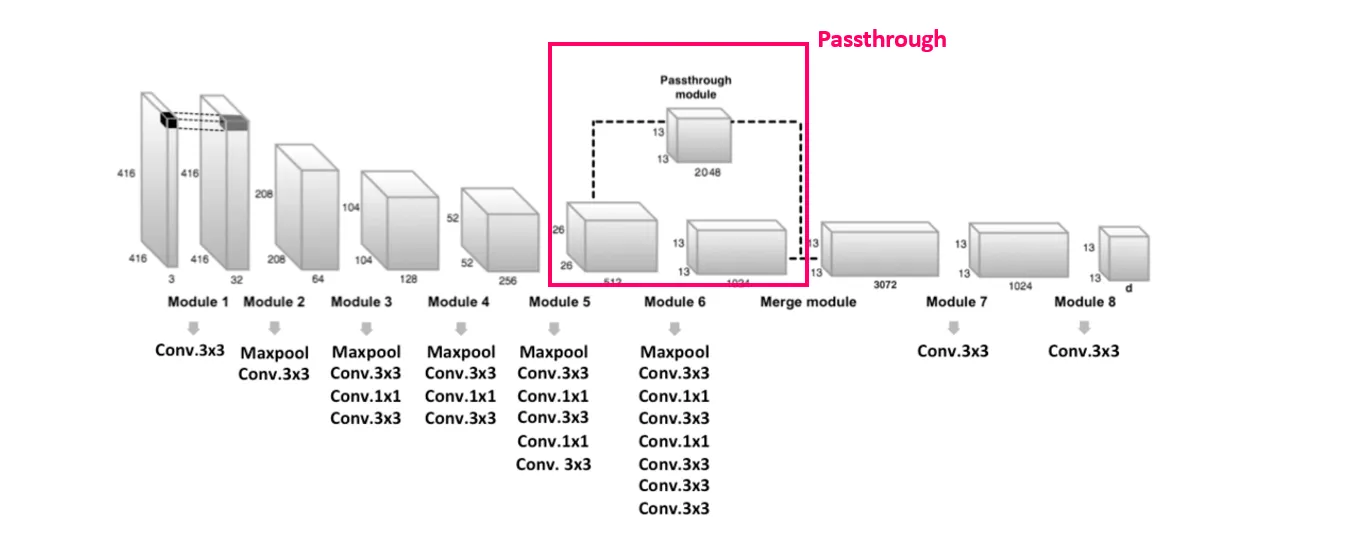
模型結構的調整:
- 移除分類模型的最後三層:
- 最後一個卷積層。
- Global Average Pooling 層。
- Softmax 層。
- 新增層:
- 三個
- 一個 Passthrough 層(用於將低層特徵與高層特徵進行融合)。
- 一個
輸出設計:
- 輸出通道數為 $ \text{num_anchors} \times (5 + \text{num_classes})$,與數據集相關。
- 以 VOC 數據集(20 種分類)為例:
- Anchor 數為 5。
- 輸出的通道數為
最終輸出的形狀:
- 輸出的預測矩陣
- 將
- 輸出的預測矩陣
Conclusion
YOLOv2 通過一系列的優化和改進方法優化了 YOLOv1 模型,提高了預測準確率,同時還能繼續保持較快的檢測速度。
優點:
輸出Grid為奇數,可由正中心預測物體 使用多種方案(Batch Normalize、High Resolution Classifier),使檢測效果更佳 改為Anchor Base方法,檢測框更穩定 使用PassThrough Layer,融合較高解析度之特徵 多尺度訓練,使Detector適應圖片解析度變化 可以融合檢測及分類數據集(YOLO9000),多層級預測label
缺點:
小物體效果依然較差 YOLO 9000 之訓練方法效果依然差 (mAP:19.7)